A four-wheeled robot the size of a coffee table just logged 16 miles of rugged desert terrain — and it did so by occasionally picking up its own wheels. NASA’s Jet Propulsion Laboratory is testing ERNEST, a prototype rover whose active suspension and multi-gait locomotion system represent one of the most significant rethinks of planetary rover mobility in decades. Here is what the engineering tells us about where surface exploration is headed.
ERNEST Covered 16 Miles of Desert Terrain — and That Number Means Something

NASA’s Jet Propulsion Laboratory reported that the ERNEST prototype logged approximately 16 miles (26 km) during a desert field test campaign, completing that distance in just 37 hours of cumulative driving time. That second figure reflects actual wheel-turning time, not total elapsed mission clock — a distinction that matters when comparing prototype efficiency to operational rovers, which spend the large majority of their time stopped for science observations, data uplinks, or ground-team planning sessions.
The test was deliberately designed to stress-test not just raw speed but the durability of ERNEST’s unconventional locomotion system across varied natural terrain, including loose soil, embedded rocks, and uneven slopes. Sustaining that pace over real desert terrain, rather than a flat laboratory floor, lends the result credibility as a field-relevant performance metric. Completing that distance without a disqualifying mechanical failure is itself a meaningful result — one that rivals or exceeds the total odometry accumulated by some operational Mars missions over the course of their entire careers.
ERNEST Drives Roughly 10 Times Faster Than Perseverance or Curiosity

ERNEST reached approximately 0.6 mph (roughly 1 km/h) during testing, according to JPL’s announcement. NASA’s Perseverance and Curiosity rovers operate at around 0.06 mph under autonomous navigation — placing ERNEST’s peak speed at roughly 10 times greater, a gap that is striking even when accounting for the fundamental difference between a prototype operating on Earth and a flight system operating on Mars.
Speed on Mars is constrained by the lag in Earth-based command uplinks and the processing limits of onboard hazard-avoidance software, so faster hardware must be paired with smarter autonomy. The hardware speed gain ERNEST demonstrates is a necessary but not sufficient condition for faster Mars driving — an engineering challenge the broader ERNEST development program is explicitly intended to help address.
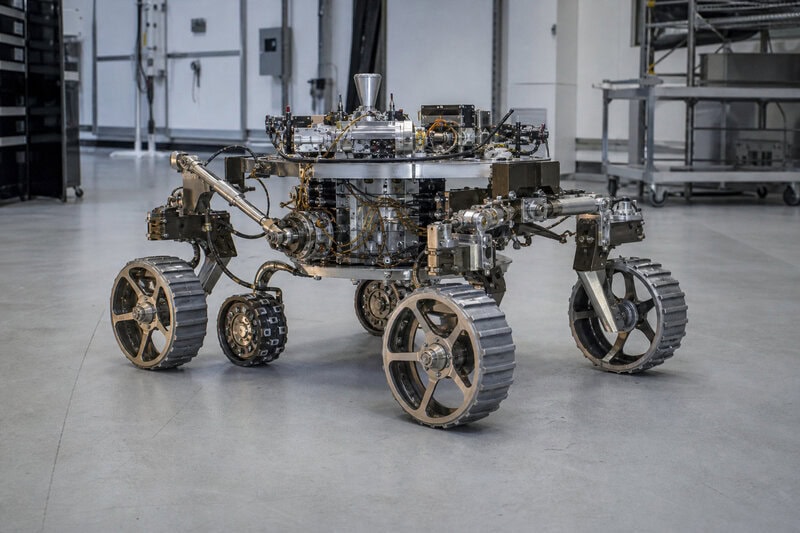
Four Wheels Instead of Six — A Deliberate Break From Rover Tradition

Every NASA rover to successfully operate on Mars — Sojourner, Spirit, Opportunity, Curiosity, and Perseverance — has used six wheels, a configuration chosen because it provides passive mechanical stability over rocky ground without requiring constant active correction. ERNEST uses only four wheels, a reduction that saves mass and mechanical complexity but demands a more sophisticated active suspension system to compensate for the stability the two absent wheels would otherwise provide passively.
JPL’s choice signals a meaningful design philosophy shift: rely on intelligent motion control rather than mechanical redundancy to handle difficult terrain. Whether that trade-off holds up under the full rigors of a Mars environment remains an open question, but the desert test data offers early encouragement.
The Wheel-Lifting Capability Comes From Powered Gimbal Joints at the Front

ERNEST’s active suspension features two powered front joints that articulate a gimbal — a pivoting mechanical assembly that permits rotation on multiple axes — allowing each front wheel to swing upward independently of the rover body. This gives the joint far more freedom of movement than the fixed or passively sprung axles used on legacy Mars rovers, which can roll over obstacles but cannot reposition a wheel the way a limb might.
This mechanism is what physically allows ERNEST to step a wheel over an obstacle rather than simply attempting to roll over it, fundamentally changing how the rover interacts with rough terrain. The conceptual difference is similar to the gap between rolling a suitcase over a curb and lifting it: one approach is passive, the other is deliberate and adaptive.
Three Distinct Locomotion Gaits in a Single Chassis
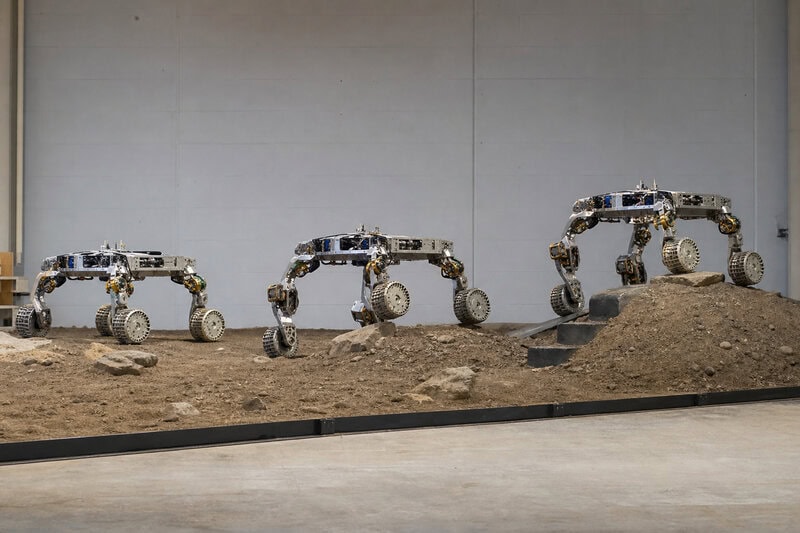
JPL’s testing confirmed that the powered joint and gimbal system enables at least three separate movement modes: standard rolling, wheel-walking, and squirming. Wheel-walking is a deliberate sequenced stepping motion in which wheels are lifted and planted one at a time rather than spun simultaneously — analogous in concept to how a crab or insect repositions its legs to gain traction or achieve precise foot placement. Squirming is a low-clearance, body-undulating technique suited to loose or steep surfaces where spinning wheels would simply dig in and lose purchase.
Having multiple gaits in a single chassis means one rover can adapt its locomotion strategy to the specific hazard it faces, rather than being locked into a single approach regardless of conditions. That adaptability is particularly valuable on planetary surfaces where terrain can shift from hard bedrock to deep regolith within a few meters — a reality well documented by Curiosity and Perseverance during their traverses of Gale Crater and Jezero Crater respectively.
A Built-In Clutch Keeps the Multi-Gait System Practical
Incorporated into ERNEST’s mobility system is a clutch — a mechanical coupling device that can engage or disengage power transmission between components — allowing the rover to transition smoothly between its different locomotion modes. In practical terms, the clutch lets ERNEST redirect drive power from spinning a wheel to articulating a joint, or vice versa, without requiring a separate dedicated motor for every function.
This kind of mechanical multiplexing keeps total mass and part count lower, a critical consideration for any hardware that might eventually be destined for interplanetary flight, where every gram added to a spacecraft carries a compounding cost in propellant and launch vehicle capacity. Simplicity of this kind is rarely accidental in JPL hardware — it reflects deliberate engineering choices made with an eye toward eventual flightworthiness.
At Four Feet Long, the Prototype Is Scaled to Produce Meaningful Data
In its current desert-test configuration, ERNEST measures approximately four feet (roughly 1.2 meters) in length, according to JPL. That scale is large enough that the terrain features it encounters — rocks, slopes, and loose soil — present challenges proportionally similar to those a full-size Mars rover would face, giving the test data genuine engineering relevance rather than making it a mere tabletop exercise.
Prototype testing at this size is standard JPL practice: it allows engineers to validate mechanical concepts and identify failure modes before committing to the far greater cost and complexity of a flight-scale build. Lessons learned at four feet are substantially cheaper than lessons learned after a spacecraft has launched.
One Platform Designed for Two Very Different Worlds
JPL’s testing announcement specified that ERNEST’s mobility system is being developed with dual-destination applicability: the lunar surface and Mars. The two environments present distinct engineering challenges. The Moon has no atmosphere and carries extremely abrasive regolith that can degrade exposed mechanisms quickly. Mars has a thin carbon-dioxide atmosphere, gravity lower than Earth’s but higher than the Moon’s, and fine dust that can infiltrate and foul hardware over time — as the solar-powered Opportunity rover demonstrated when dust accumulation ultimately ended its mission in 2018.
Designing one mobility platform capable of operating credibly in both environments, if fully validated, would represent a significant versatility gain for NASA’s future surface exploration programs. That remains a substantial if: ERNEST is still a research prototype, no formal mission assignment has been announced, and the path from desert field testing to a flight-qualified system involves many additional engineering hurdles — qualification testing, thermal-vacuum performance, radiation tolerance, and more — that have not yet been cleared.
Even with those caveats, the combination of a tenfold speed advantage over current rovers, a novel wheel-lifting capability enabled by powered gimbal joints, a three-gait locomotion system, and credible multi-terrain field data makes ERNEST one of the more technically substantive advances in planetary rover mobility to emerge from JPL in recent years. The 16-mile desert traverse did not prove ERNEST is ready for Mars. It did prove the concept is worth taking seriously.